Note
Go to the end to download the full example code
Generative Models of Graphs
Author: Mufei Li, Lingfan Yu, Zheng Zhang
Warning
The tutorial aims at gaining insights into the paper, with code as a mean of explanation. The implementation thus is NOT optimized for running efficiency. For recommended implementation, please refer to the official examples.
In this tutorial, you learn how to train and generate one graph at a time. You also explore parallelism within the graph embedding operation, which is an essential building block. The tutorial ends with a simple optimization that delivers double the speed by batching across graphs.
Earlier tutorials showed how embedding a graph or a node enables you to work on tasks such as semi-supervised classification for nodes or sentiment analysis. Wouldn’t it be interesting to predict the future evolution of the graph and perform the analysis iteratively?
To address the evolution of the graphs, you generate a variety of graph samples. In other words, you need generative models of graphs. In-addition to learning node and edge features, you would need to model the distribution of arbitrary graphs. While general generative models can model the density function explicitly and implicitly and generate samples at once or sequentially, you only focus on explicit generative models for sequential generation here. Typical applications include drug or materials discovery, chemical processes, or proteomics.
Introduction
The primitive actions of mutating a graph in Deep Graph Library (DGL) are nothing more than add_nodes
and add_edges. That is, if you were to draw a circle of three nodes,

you can write the code as follows.
import os
os.environ["DGLBACKEND"] = "pytorch"
import dgl
g = dgl.DGLGraph()
g.add_nodes(1) # Add node 0
g.add_nodes(1) # Add node 1
# Edges in DGLGraph are directed by default.
# For undirected edges, add edges for both directions.
g.add_edges([1, 0], [0, 1]) # Add edges (1, 0), (0, 1)
g.add_nodes(1) # Add node 2
g.add_edges([2, 1], [1, 2]) # Add edges (2, 1), (1, 2)
g.add_edges([2, 0], [0, 2]) # Add edges (2, 0), (0, 2)
/home/ubuntu/prod-doc/readthedocs.org/user_builds/dgl/checkouts/2.2.x/python/dgl/heterograph.py:92: DGLWarning: Recommend creating graphs by `dgl.graph(data)` instead of `dgl.DGLGraph(data)`.
dgl_warning(
Real-world graphs are much more complex. There are many families of graphs, with different sizes, topologies, node types, edge types, and the possibility of multigraphs. Besides, a same graph can be generated in many different orders. Regardless, the generative process entails a few steps.
Encode a changing graph.
Perform actions stochastically.
If you are training, collect error signals and optimize the model parameters.
When it comes to implementation, another important aspect is speed. How do you parallelize the computation, given that generating a graph is fundamentally a sequential process?
Note
To be sure, this is not necessarily a hard constraint. Subgraphs can be built in parallel and then get assembled. But we will restrict ourselves to the sequential processes for this tutorial.
DGMG: The main flow
For this tutorial, you use Deep Generative Models of Graphs ) (DGMG) to implement a graph generative model using DGL. Its algorithmic framework is general but also challenging to parallelize.
Note
While it’s possible for DGMG to handle complex graphs with typed nodes, typed edges, and multigraphs, here you use a simplified version of it for generating graph topologies.
DGMG generates a graph by following a state machine, which is basically a two-level loop. Generate one node at a time and connect it to a subset of the existing nodes, one at a time. This is similar to language modeling. The generative process is an iterative one that emits one word or character or sentence at a time, conditioned on the sequence generated so far.
- At each time step, you either:
Add a new node to the graph
Select two existing nodes and add an edge between them
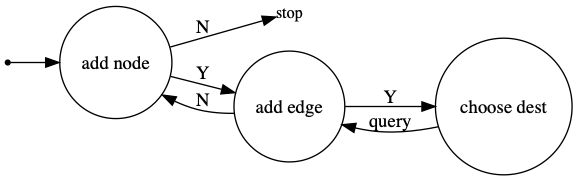
The Python code will look as follows. In fact, this is exactly how inference with DGMG is implemented in DGL.
def forward_inference(self):
stop = self.add_node_and_update()
while (not stop) and (self.g.num_nodes() < self.v_max + 1):
num_trials = 0
to_add_edge = self.add_edge_or_not()
while to_add_edge and (num_trials < self.g.num_nodes() - 1):
self.choose_dest_and_update()
num_trials += 1
to_add_edge = self.add_edge_or_not()
stop = self.add_node_and_update()
return self.g
Assume you have a pre-trained model for generating cycles of nodes 10-20. How does it generate a cycle on-the-fly during inference? Use the code below to create an animation with your own model.
import torch
import matplotlib.animation as animation
import matplotlib.pyplot as plt
import networkx as nx
from copy import deepcopy
if __name__ == '__main__':
# pre-trained model saved with path ./model.pth
model = torch.load('./model.pth')
model.eval()
g = model()
src_list = g.edges()[1]
dest_list = g.edges()[0]
evolution = []
nx_g = nx.Graph()
evolution.append(deepcopy(nx_g))
for i in range(0, len(src_list), 2):
src = src_list[i].item()
dest = dest_list[i].item()
if src not in nx_g.nodes():
nx_g.add_node(src)
evolution.append(deepcopy(nx_g))
if dest not in nx_g.nodes():
nx_g.add_node(dest)
evolution.append(deepcopy(nx_g))
nx_g.add_edges_from([(src, dest), (dest, src)])
evolution.append(deepcopy(nx_g))
def animate(i):
ax.cla()
g_t = evolution[i]
nx.draw_circular(g_t, with_labels=True, ax=ax,
node_color=['#FEBD69'] * g_t.num_nodes())
fig, ax = plt.subplots()
ani = animation.FuncAnimation(fig, animate,
frames=len(evolution),
interval=600)

DGMG: Optimization objective
Similar to language modeling, DGMG trains the model with behavior cloning, or teacher forcing. Assume for each graph there exists a sequence of oracle actions \(a_{1},\cdots,a_{T}\) that generates it. What the model does is to follow these actions, compute the joint probabilities of such action sequences, and maximize them.
By chain rule, the probability of taking \(a_{1},\cdots,a_{T}\) is:
The optimization objective is then simply the typical MLE loss:
def forward_train(self, actions):
"""
- actions: list
- Contains a_1, ..., a_T described above
- self.prepare_for_train()
- Initializes self.action_step to be 0, which will get
incremented by 1 every time it is called.
- Initializes objects recording log p(a_t|a_1,...a_{t-1})
Returns
-------
- self.get_log_prob(): log p(a_1, ..., a_T)
"""
self.prepare_for_train()
stop = self.add_node_and_update(a=actions[self.action_step])
while not stop:
to_add_edge = self.add_edge_or_not(a=actions[self.action_step])
while to_add_edge:
self.choose_dest_and_update(a=actions[self.action_step])
to_add_edge = self.add_edge_or_not(a=actions[self.action_step])
stop = self.add_node_and_update(a=actions[self.action_step])
return self.get_log_prob()
The key difference between forward_train and forward_inference is
that the training process takes oracle actions as input and returns log
probabilities for evaluating the loss.
DGMG: The implementation
The DGMG class
Below you can find the skeleton code for the model. You gradually fill in the details for each function.
import torch.nn as nn
class DGMGSkeleton(nn.Module):
def __init__(self, v_max):
"""
Parameters
----------
v_max: int
Max number of nodes considered
"""
super(DGMGSkeleton, self).__init__()
# Graph configuration
self.v_max = v_max
def add_node_and_update(self, a=None):
"""Decide if to add a new node.
If a new node should be added, update the graph."""
return NotImplementedError
def add_edge_or_not(self, a=None):
"""Decide if a new edge should be added."""
return NotImplementedError
def choose_dest_and_update(self, a=None):
"""Choose destination and connect it to the latest node.
Add edges for both directions and update the graph."""
return NotImplementedError
def forward_train(self, actions):
"""Forward at training time. It records the probability
of generating a ground truth graph following the actions."""
return NotImplementedError
def forward_inference(self):
"""Forward at inference time.
It generates graphs on the fly."""
return NotImplementedError
def forward(self, actions=None):
# The graph you will work on
self.g = dgl.DGLGraph()
# If there are some features for nodes and edges,
# zero tensors will be set for those of new nodes and edges.
self.g.set_n_initializer(dgl.frame.zero_initializer)
self.g.set_e_initializer(dgl.frame.zero_initializer)
if self.training:
return self.forward_train(actions=actions)
else:
return self.forward_inference()
Encoding a dynamic graph
All the actions generating a graph are sampled from probability distributions. In order to do that, you project the structured data, namely the graph, onto an Euclidean space. The challenge is that such process, called embedding, needs to be repeated as the graphs mutate.
Graph embedding
Let \(G=(V,E)\) be an arbitrary graph. Each node \(v\) has an embedding vector \(\textbf{h}_{v} \in \mathbb{R}^{n}\). Similarly, the graph has an embedding vector \(\textbf{h}_{G} \in \mathbb{R}^{k}\). Typically, \(k > n\) since a graph contains more information than an individual node.
The graph embedding is a weighted sum of node embeddings under a linear transformation:
The first term, \(\text{Sigmoid}(g_m(\textbf{h}_{v}))\), computes a gating function and can be thought of as how much the overall graph embedding attends on each node. The second term \(f_{m}:\mathbb{R}^{n}\rightarrow\mathbb{R}^{k}\) maps the node embeddings to the space of graph embeddings.
Implement graph embedding as a GraphEmbed class.
import torch
class GraphEmbed(nn.Module):
def __init__(self, node_hidden_size):
super(GraphEmbed, self).__init__()
# Setting from the paper
self.graph_hidden_size = 2 * node_hidden_size
# Embed graphs
self.node_gating = nn.Sequential(
nn.Linear(node_hidden_size, 1), nn.Sigmoid()
)
self.node_to_graph = nn.Linear(node_hidden_size, self.graph_hidden_size)
def forward(self, g):
if g.num_nodes() == 0:
return torch.zeros(1, self.graph_hidden_size)
else:
# Node features are stored as hv in ndata.
hvs = g.ndata["hv"]
return (self.node_gating(hvs) * self.node_to_graph(hvs)).sum(
0, keepdim=True
)
Update node embeddings via graph propagation
The mechanism of updating node embeddings in DGMG is similar to that for graph convolutional networks. For a node \(v\) in the graph, its neighbor \(u\) sends a message to it with
where \(\textbf{x}_{u,v}\) is the embedding of the edge between \(u\) and \(v\).
After receiving messages from all its neighbors, \(v\) summarizes them with a node activation vector
and use this information to update its own feature:
Performing all the operations above once for all nodes synchronously is called one round of graph propagation. The more rounds of graph propagation you perform, the longer distance messages travel throughout the graph.
With DGL, you implement graph propagation with g.update_all.
The message notation here can be a bit confusing. Researchers can refer
to \(\textbf{m}_{u\rightarrow v}\) as messages, however the message function
below only passes \(\text{concat}([\textbf{h}_{u}, \textbf{x}_{u, v}])\).
The operation \(\textbf{W}_{m}\text{concat}([\textbf{h}_{v}, \textbf{h}_{u}, \textbf{x}_{u, v}]) + \textbf{b}_{m}\)
is then performed across all edges at once for efficiency consideration.
from functools import partial
class GraphProp(nn.Module):
def __init__(self, num_prop_rounds, node_hidden_size):
super(GraphProp, self).__init__()
self.num_prop_rounds = num_prop_rounds
# Setting from the paper
self.node_activation_hidden_size = 2 * node_hidden_size
message_funcs = []
node_update_funcs = []
self.reduce_funcs = []
for t in range(num_prop_rounds):
# input being [hv, hu, xuv]
message_funcs.append(
nn.Linear(
2 * node_hidden_size + 1, self.node_activation_hidden_size
)
)
self.reduce_funcs.append(partial(self.dgmg_reduce, round=t))
node_update_funcs.append(
nn.GRUCell(self.node_activation_hidden_size, node_hidden_size)
)
self.message_funcs = nn.ModuleList(message_funcs)
self.node_update_funcs = nn.ModuleList(node_update_funcs)
def dgmg_msg(self, edges):
"""For an edge u->v, return concat([h_u, x_uv])"""
return {"m": torch.cat([edges.src["hv"], edges.data["he"]], dim=1)}
def dgmg_reduce(self, nodes, round):
hv_old = nodes.data["hv"]
m = nodes.mailbox["m"]
message = torch.cat(
[hv_old.unsqueeze(1).expand(-1, m.size(1), -1), m], dim=2
)
node_activation = (self.message_funcs[round](message)).sum(1)
return {"a": node_activation}
def forward(self, g):
if g.num_edges() > 0:
for t in range(self.num_prop_rounds):
g.update_all(
message_func=self.dgmg_msg, reduce_func=self.reduce_funcs[t]
)
g.ndata["hv"] = self.node_update_funcs[t](
g.ndata["a"], g.ndata["hv"]
)
Actions
All actions are sampled from distributions parameterized using neural networks and here they are in turn.
Action 1: Add nodes
Given the graph embedding vector \(\textbf{h}_{G}\), evaluate
which is then used to parametrize a Bernoulli distribution for deciding whether to add a new node.
If a new node is to be added, initialize its feature with
where \(\textbf{h}_{\text{init}}\) is a learnable embedding module for untyped nodes.
import torch.nn.functional as F
from torch.distributions import Bernoulli
def bernoulli_action_log_prob(logit, action):
"""Calculate the log p of an action with respect to a Bernoulli
distribution. Use logit rather than prob for numerical stability."""
if action == 0:
return F.logsigmoid(-logit)
else:
return F.logsigmoid(logit)
class AddNode(nn.Module):
def __init__(self, graph_embed_func, node_hidden_size):
super(AddNode, self).__init__()
self.graph_op = {"embed": graph_embed_func}
self.stop = 1
self.add_node = nn.Linear(graph_embed_func.graph_hidden_size, 1)
# If to add a node, initialize its hv
self.node_type_embed = nn.Embedding(1, node_hidden_size)
self.initialize_hv = nn.Linear(
node_hidden_size + graph_embed_func.graph_hidden_size,
node_hidden_size,
)
self.init_node_activation = torch.zeros(1, 2 * node_hidden_size)
def _initialize_node_repr(self, g, node_type, graph_embed):
"""Whenver a node is added, initialize its representation."""
num_nodes = g.num_nodes()
hv_init = self.initialize_hv(
torch.cat(
[
self.node_type_embed(torch.LongTensor([node_type])),
graph_embed,
],
dim=1,
)
)
g.nodes[num_nodes - 1].data["hv"] = hv_init
g.nodes[num_nodes - 1].data["a"] = self.init_node_activation
def prepare_training(self):
self.log_prob = []
def forward(self, g, action=None):
graph_embed = self.graph_op["embed"](g)
logit = self.add_node(graph_embed)
prob = torch.sigmoid(logit)
if not self.training:
action = Bernoulli(prob).sample().item()
stop = bool(action == self.stop)
if not stop:
g.add_nodes(1)
self._initialize_node_repr(g, action, graph_embed)
if self.training:
sample_log_prob = bernoulli_action_log_prob(logit, action)
self.log_prob.append(sample_log_prob)
return stop
Action 2: Add edges
Given the graph embedding vector \(\textbf{h}_{G}\) and the node embedding vector \(\textbf{h}_{v}\) for the latest node \(v\), you evaluate
which is then used to parametrize a Bernoulli distribution for deciding whether to add a new edge starting from \(v\).
class AddEdge(nn.Module):
def __init__(self, graph_embed_func, node_hidden_size):
super(AddEdge, self).__init__()
self.graph_op = {"embed": graph_embed_func}
self.add_edge = nn.Linear(
graph_embed_func.graph_hidden_size + node_hidden_size, 1
)
def prepare_training(self):
self.log_prob = []
def forward(self, g, action=None):
graph_embed = self.graph_op["embed"](g)
src_embed = g.nodes[g.num_nodes() - 1].data["hv"]
logit = self.add_edge(torch.cat([graph_embed, src_embed], dim=1))
prob = torch.sigmoid(logit)
if self.training:
sample_log_prob = bernoulli_action_log_prob(logit, action)
self.log_prob.append(sample_log_prob)
else:
action = Bernoulli(prob).sample().item()
to_add_edge = bool(action == 0)
return to_add_edge
Action 3: Choose a destination
When action 2 returns True, choose a destination for the latest node \(v\).
For each possible destination \(u\in\{0, \cdots, v-1\}\), the probability of choosing it is given by
from torch.distributions import Categorical
class ChooseDestAndUpdate(nn.Module):
def __init__(self, graph_prop_func, node_hidden_size):
super(ChooseDestAndUpdate, self).__init__()
self.graph_op = {"prop": graph_prop_func}
self.choose_dest = nn.Linear(2 * node_hidden_size, 1)
def _initialize_edge_repr(self, g, src_list, dest_list):
# For untyped edges, only add 1 to indicate its existence.
# For multiple edge types, use a one-hot representation
# or an embedding module.
edge_repr = torch.ones(len(src_list), 1)
g.edges[src_list, dest_list].data["he"] = edge_repr
def prepare_training(self):
self.log_prob = []
def forward(self, g, dest):
src = g.num_nodes() - 1
possible_dests = range(src)
src_embed_expand = g.nodes[src].data["hv"].expand(src, -1)
possible_dests_embed = g.nodes[possible_dests].data["hv"]
dests_scores = self.choose_dest(
torch.cat([possible_dests_embed, src_embed_expand], dim=1)
).view(1, -1)
dests_probs = F.softmax(dests_scores, dim=1)
if not self.training:
dest = Categorical(dests_probs).sample().item()
if not g.has_edges_between(src, dest):
# For undirected graphs, add edges for both directions
# so that you can perform graph propagation.
src_list = [src, dest]
dest_list = [dest, src]
g.add_edges(src_list, dest_list)
self._initialize_edge_repr(g, src_list, dest_list)
self.graph_op["prop"](g)
if self.training:
if dests_probs.nelement() > 1:
self.log_prob.append(
F.log_softmax(dests_scores, dim=1)[:, dest : dest + 1]
)
Putting it together
You are now ready to have a complete implementation of the model class.
class DGMG(DGMGSkeleton):
def __init__(self, v_max, node_hidden_size, num_prop_rounds):
super(DGMG, self).__init__(v_max)
# Graph embedding module
self.graph_embed = GraphEmbed(node_hidden_size)
# Graph propagation module
self.graph_prop = GraphProp(num_prop_rounds, node_hidden_size)
# Actions
self.add_node_agent = AddNode(self.graph_embed, node_hidden_size)
self.add_edge_agent = AddEdge(self.graph_embed, node_hidden_size)
self.choose_dest_agent = ChooseDestAndUpdate(
self.graph_prop, node_hidden_size
)
# Forward functions
self.forward_train = partial(forward_train, self=self)
self.forward_inference = partial(forward_inference, self=self)
@property
def action_step(self):
old_step_count = self.step_count
self.step_count += 1
return old_step_count
def prepare_for_train(self):
self.step_count = 0
self.add_node_agent.prepare_training()
self.add_edge_agent.prepare_training()
self.choose_dest_agent.prepare_training()
def add_node_and_update(self, a=None):
"""Decide if to add a new node.
If a new node should be added, update the graph."""
return self.add_node_agent(self.g, a)
def add_edge_or_not(self, a=None):
"""Decide if a new edge should be added."""
return self.add_edge_agent(self.g, a)
def choose_dest_and_update(self, a=None):
"""Choose destination and connect it to the latest node.
Add edges for both directions and update the graph."""
self.choose_dest_agent(self.g, a)
def get_log_prob(self):
add_node_log_p = torch.cat(self.add_node_agent.log_prob).sum()
add_edge_log_p = torch.cat(self.add_edge_agent.log_prob).sum()
choose_dest_log_p = torch.cat(self.choose_dest_agent.log_prob).sum()
return add_node_log_p + add_edge_log_p + choose_dest_log_p
Below is an animation where a graph is generated on the fly after every 10 batches of training for the first 400 batches. You can see how the model improves over time and begins generating cycles.
For generative models, you can evaluate performance by checking the percentage of valid graphs among the graphs it generates on the fly.
import torch.utils.model_zoo as model_zoo
# Download a pre-trained model state dict for generating cycles with 10-20 nodes.
state_dict = model_zoo.load_url(
"https://data.dgl.ai/model/dgmg_cycles-5a0c40be.pth"
)
model = DGMG(v_max=20, node_hidden_size=16, num_prop_rounds=2)
model.load_state_dict(state_dict)
model.eval()
def is_valid(g):
# Check if g is a cycle having 10-20 nodes.
def _get_previous(i, v_max):
if i == 0:
return v_max
else:
return i - 1
def _get_next(i, v_max):
if i == v_max:
return 0
else:
return i + 1
size = g.num_nodes()
if size < 10 or size > 20:
return False
for node in range(size):
neighbors = g.successors(node)
if len(neighbors) != 2:
return False
if _get_previous(node, size - 1) not in neighbors:
return False
if _get_next(node, size - 1) not in neighbors:
return False
return True
num_valid = 0
for i in range(100):
g = model()
num_valid += is_valid(g)
del model
print("Among 100 graphs generated, {}% are valid.".format(num_valid))
/home/ubuntu/prod-doc/readthedocs.org/user_builds/dgl/checkouts/2.2.x/tutorials/models/3_generative_model/5_dgmg.py:521: DeprecationWarning: an integer is required (got type float). Implicit conversion to integers using __int__ is deprecated, and may be removed in a future version of Python.
self.node_type_embed(torch.LongTensor([node_type])),
Among 100 graphs generated, 99% are valid.
For the complete implementation, see the DGL DGMG example.
Total running time of the script: (0 minutes 19.192 seconds)