Chapter 6: Stochastic Training on Large Graphs
If we have a massive graph with, say, millions or even billions of nodes or edges, usually full-graph training as described in Chapter 5: Training Graph Neural Networks would not work. Consider an \(L\)-layer graph convolutional network with hidden state size \(H\) running on an \(N\)-node graph. Storing the intermediate hidden states requires \(O(NLH)\) memory, easily exceeding one GPU’s capacity with large \(N\).
This section provides a way to perform stochastic minibatch training, where we do not have to fit the feature of all the nodes into GPU.
Overview of Neighborhood Sampling Approaches
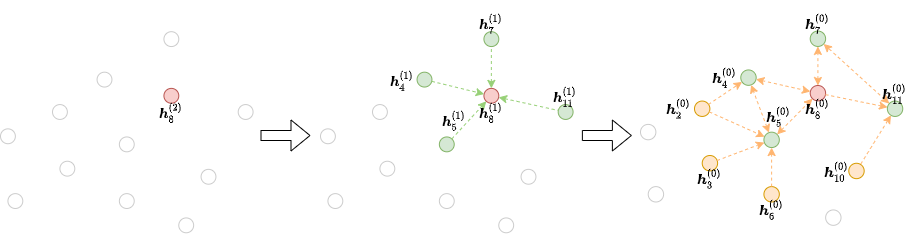
Neighborhood sampling methods generally work as the following. For each gradient descent step, we select a minibatch of nodes whose final representations at the \(L\)-th layer are to be computed. We then take all or some of their neighbors at the \(L-1\) layer. This process continues until we reach the input. This iterative process builds the dependency graph starting from the output and working backwards to the input, as the figure below shows:
With this, one can save the workload and computation resources for training a GNN on a large graph.
DGL provides a few neighborhood samplers and a pipeline for training a GNN with neighborhood sampling, as well as ways to customize your sampling strategies.
Roadmap
The chapter starts with sections for training GNNs stochastically under different scenarios.
6.1 Training GNN for Node Classification with Neighborhood Sampling
6.2 Training GNN for Edge Classification with Neighborhood Sampling
6.3 Training GNN for Link Prediction with Neighborhood Sampling
The remaining sections cover more advanced topics, suitable for those who wish to develop new sampling algorithms, new GNN modules compatible with mini-batch training and understand how evaluation and inference can be conducted in mini-batches.
The following are performance tips for implementing and using neighborhood sampling: