第7章:分布式训练
DGL采用完全分布式的方法,可将数据和计算同时分布在一组计算资源中。在本节中, 我们默认使用一个集群的环境设置(即一组机器)。DGL会将一张图划分为多张子图, 集群中的每台机器各自负责一张子图(分区)。为了并行化计算,DGL在集群所有机器上运行相同的训练脚本, 并在同样的机器上运行服务器以将分区数据提供给训练器。
对于训练脚本,DGL提供了分布式的API。它们与小批次训练的API相似。用户仅需对单机小批次训练的代码稍作修改就可实现分布式训练。 以下代码给出了一个用分布式方式训练GraphSage的示例。仅有的代码修改出现在第4-7行:1)初始化DGL的分布式模块,2)创建分布式图对象,以及 3)拆分训练集,并计算本地进程的节点。其余代码保持不变,与 mini_cn-batch training 类似, 包括:创建采样器,模型定义,模型训练的循环。
import dgl
import torch as th
dgl.distributed.initialize('ip_config.txt')
th.distributed.init_process_group(backend='gloo')
g = dgl.distributed.DistGraph('graph_name', 'part_config.json')
pb = g.get_partition_book()
train_nid = dgl.distributed.node_split(g.ndata['train_mask'], pb, force_even=True)
# 创建采样器
sampler = NeighborSampler(g, [10,25],
dgl.distributed.sample_neighbors,
device)
dataloader = DistDataLoader(
dataset=train_nid.numpy(),
batch_size=batch_size,
collate_fn=sampler.sample_blocks,
shuffle=True,
drop_last=False)
# 定义模型和优化器
model = SAGE(in_feats, num_hidden, n_classes, num_layers, F.relu, dropout)
model = th.nn.parallel.DistributedDataParallel(model)
loss_fcn = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=args.lr)
# 模型训练的循环
for epoch in range(args.num_epochs):
for step, blocks in enumerate(dataloader):
batch_inputs, batch_labels = load_subtensor(g, blocks[0].srcdata[dgl.NID],
blocks[-1].dstdata[dgl.NID])
batch_pred = model(blocks, batch_inputs)
loss = loss_fcn(batch_pred, batch_labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
在一个集群的机器上运行训练脚本时,DGL提供了一些工具,可将数据复制到集群的计算机上,并在所有机器上启动训练任务。
Note: 当前版本的分布式训练API仅支持PyTorch后端。
Note: 当前版本的实现仅支持具有一种节点类型和一种边类型的图。
DGL实现了一些分布式组件以支持分布式训练,下图显示了这些组件及它们间的相互作用。
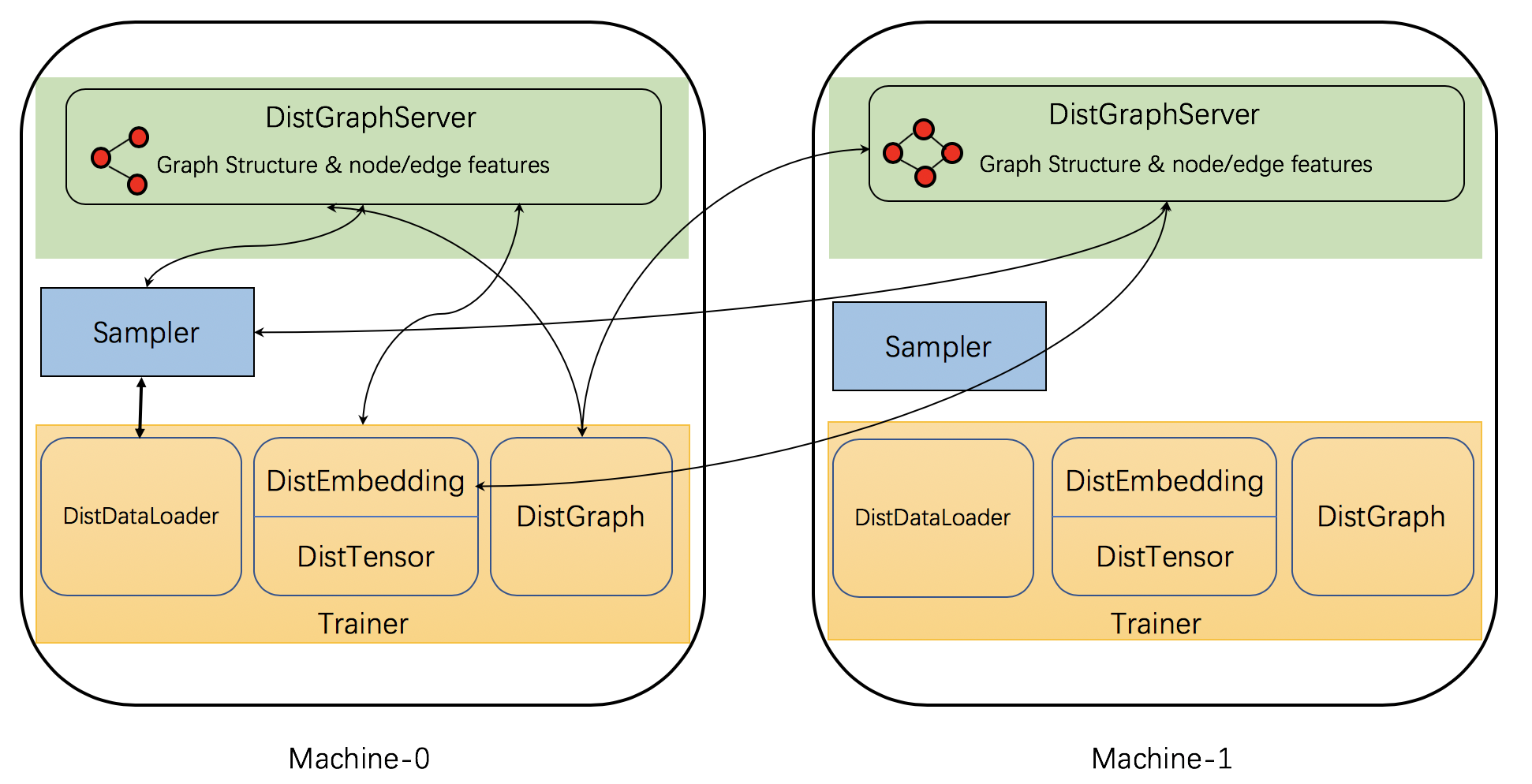
具体来说,DGL的分布式训练具有三种类型的交互进程: 服务器, 采样器 和 训练器。
服务器进程 在存储图分区数据(这包括图结构和节点/边特征)的每台计算机上运行。 这些服务器一起工作以将图数据提供给训练器。请注意,一台机器可能同时运行多个服务器进程,以并行化计算和网络通信。
采样器进程 与服务器进行交互,并对节点和边采样以生成用于训练的小批次数据。
训练器进程 包含多个与服务器交互的类。它用
DistGraph来获取被划分的图分区数据, 用DistEmbedding和DistTensor来获取节点/边特征/嵌入,用DistDataLoader与采样器进行交互以获得小批次数据。
在初步了解了分布式组件后,本章的剩余部分将介绍以下分布式组件: